SLAM and VIO
Interesting article: Real-Time Location-Based Rendering of Urban Underground Pipelines, with quote:
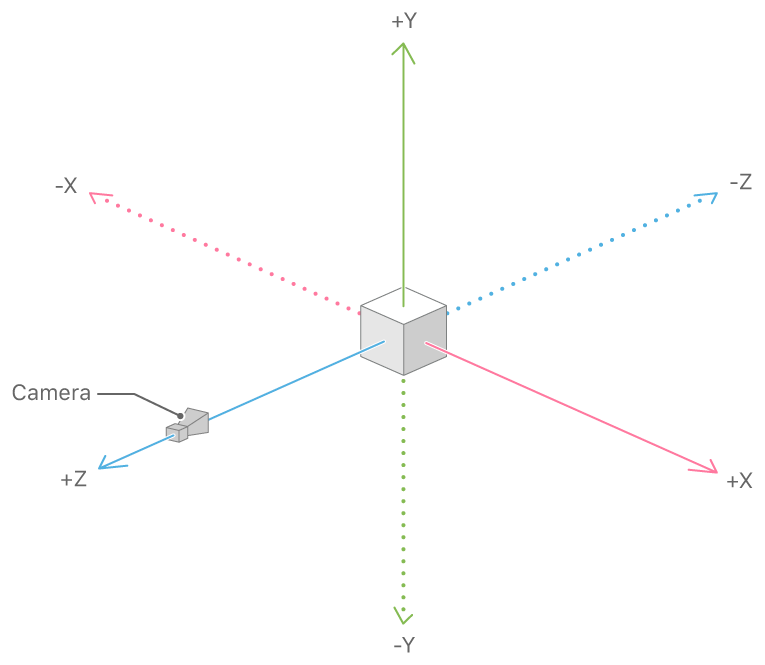
The inevitable direction of future development is simultaneous localization and mapping (SLAM) [20] technology, which can build a model simulating the real environment through the background process based on panoramic 3D reconstruction. The model is then rendered to a display device after scene-graph fusion of the virtual world and the real world so as to achieve an interaction of the two worlds. Localization and mapping are the key functions of SLAM, which can be divided into two separate threads [21–23]. Motion tracking based on MonoSLAM [24] has problems such as extensive calculation, long work time, existing scale ambiguity [21], and difficulty detecting feature points when the device is moving fast. The integration of inertial measurement unit IMU [25] to get six degrees of freedom (6DOF) [26] of the device plays a complementary role in improving its refresh rate and accuracy. For example, Google Tango [27] and the updated ARKit in iOS 11, released in June 2017, utilize the Visual-Inertial Odometry (VIO) [28] method, which combines vision and inertia to gain 6DOF of the mobile device. The difference is that Google Tango achieves 3D reconstruction with hardware, such as a depth camera and a fisheye camera, while optimization based on the ARKit’s algorithms allows most iOS devices to have AR capabilities. Without depth perception, ARKit currently can only detect planes, which means it cannot achieve reconstruction of the environment, like Tango, or complete a complex environment interaction.
Side note:
On 15 December 2017, Google announced that they will be turning down support for Tango on March 1, 2018, in favor of ARCore.[7]
Scene Fusion in AR
An Indoor Scene Recognition-Based 3D Registration Mechanism for Real-Time AR-GIS Visualization in Mobile Applications
AR/machine preception cloud
Building the ‘AR-Cloud’: Part One – Edward Miller – Medium
Building the ‘AR-Cloud’: Part One – Edward Miller – Medium

Why we’re building a realtime, 3D map of the world that machines can understand
Source: medium.com/@TweetEdMiller/building-the-ar-cloud-part-one-72a7c5cd9697
VPS
Why GPS won’t be enough for the AR era – Sturfee – Medium
Why GPS won’t be enough for the AR era – Sturfee – Medium
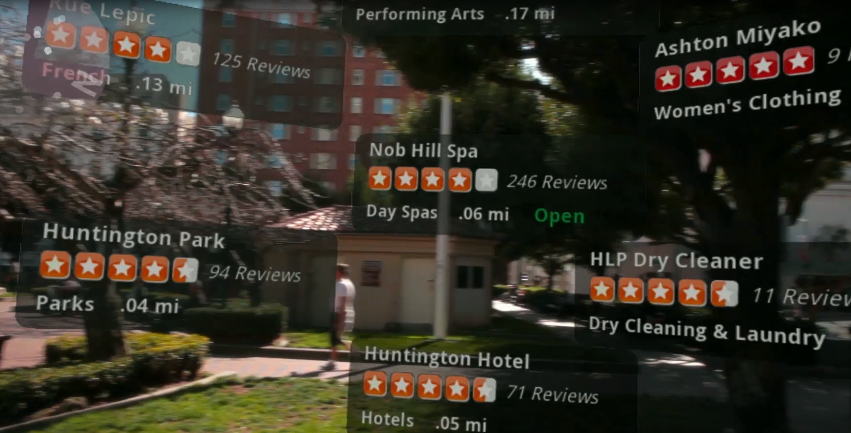
Because cameras need world-scale VPS
Source: medium.com/sturfee/why-gps-wont-be-enough-for-the-ar-era-2c647b6f3352