Redecorate Your Apartment Using iOS AR Apps
Redecorate Your Apartment Using iOS AR Apps
Redecorate Your Apartment Using iOS AR Apps
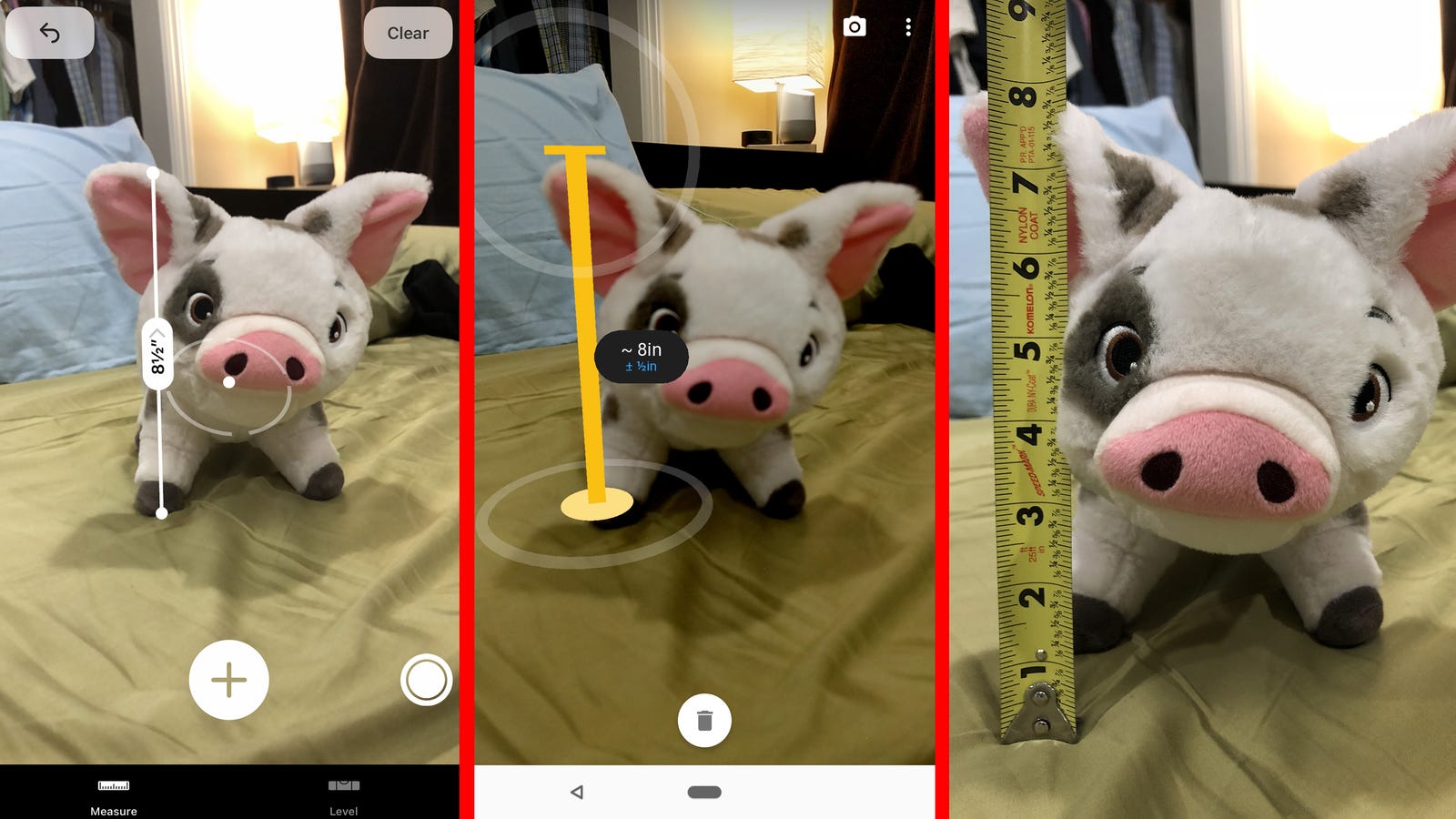
Apple’s ARKit for iOS 11 makes it relatively easy for developers to take advantage of the company’s augmented reality features, and gives consumers the opportunity to interact with a virtual world layered over your actual environment. Augmented reality games are certainly the flashiest way to demonstrate its many uses, but some of the best augmented reality apps aren’t games at all. These AR tools for iOS empower you with the tools you need to establish some sense of order in your home, plan for the future (in terms of what couch you’re going to buy this spring), and get started on some home improvement projects without lifting a hammer.
Source: lifehacker.com/use-ios-ar-apps-to-help-redecorate-your-apartment-1822193960